In the HV Power Lab we are developing the high voltage electrics.
These is the battery, powerline transmission and traction motor.
This is a distinctly different mentality from the controller and charger electronics due to the high power and safety aspects.
Patent Motor Prototype
Since the motors patent design involves a different construction to the standard PMSM/BLDC we need to construct a prototype.
To construct the motors we need to understand the current, voltage, inductance and flux.
Also in order to speed the development, we might as well construct the experimental prototype from wood rather than iron/steel.
We are going to start by working out the thickess of wire required to handle the power, which is in the 50kW to 100kW range.
Also we have to be realistic in that the motors are most likely in the 50% to 60% efficiency range so heat may be an issue too.
EV0 Testing
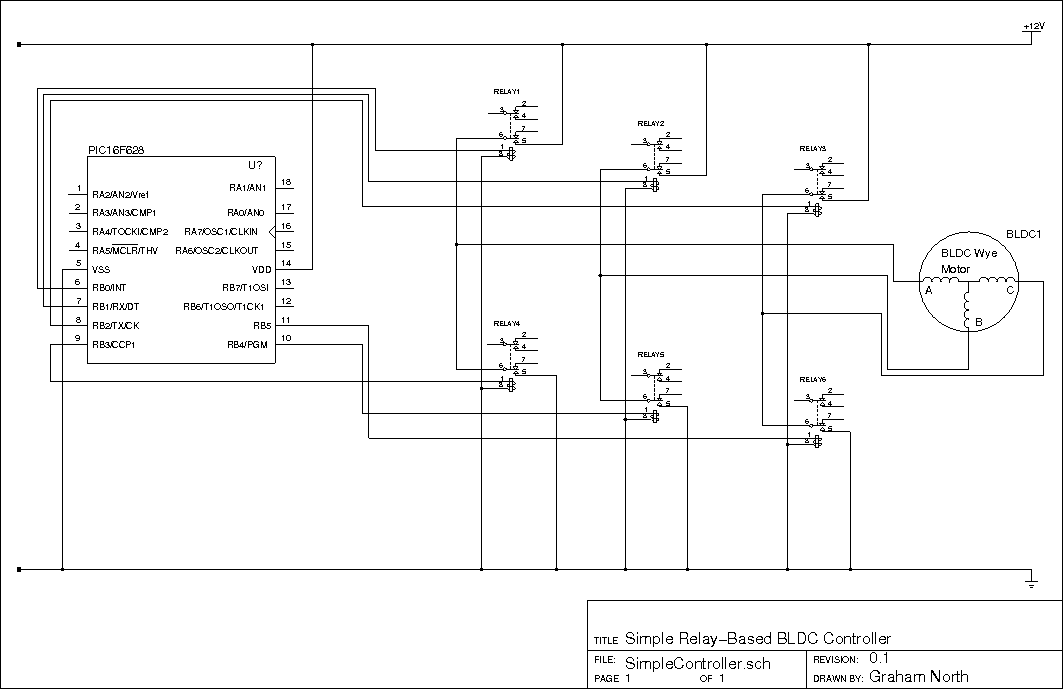
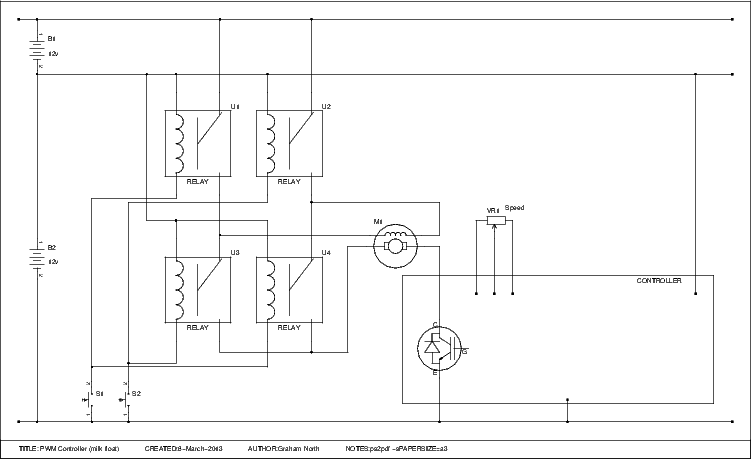
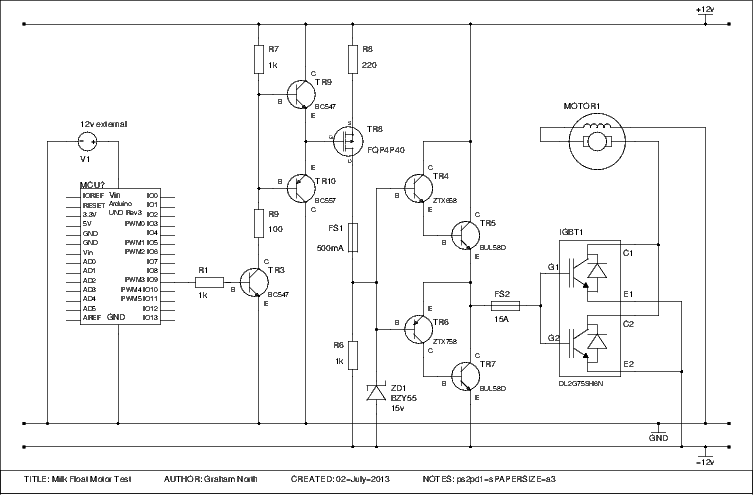
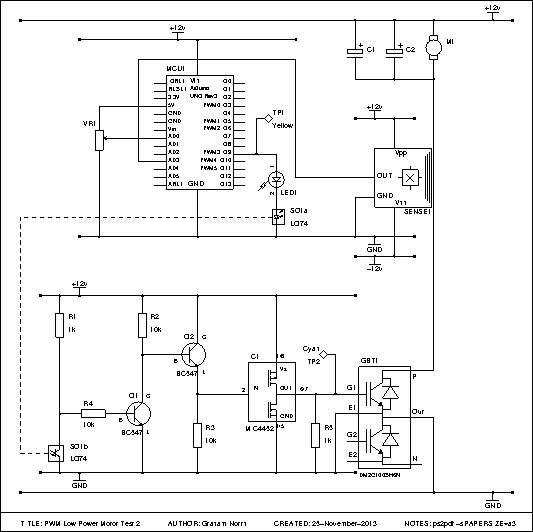
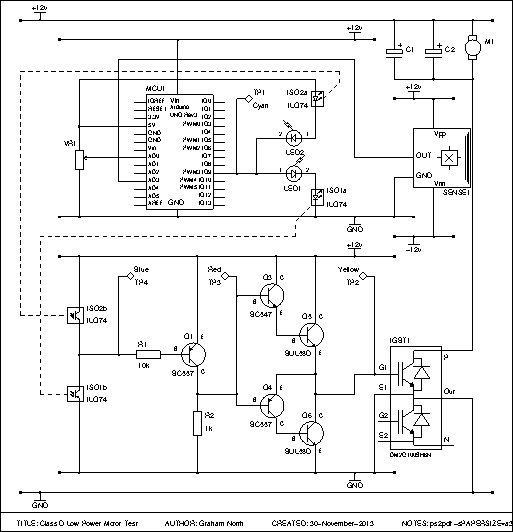
So starting from a very basic H-bridge reversing circuit for a series wound motor:
There is an issue with feedback from the motor circuit to the controller.
The standard fix for this is to include an optocoupler, but this was avoided as it introduces a delay.
Still, we need to test to see if this fixes the problem.
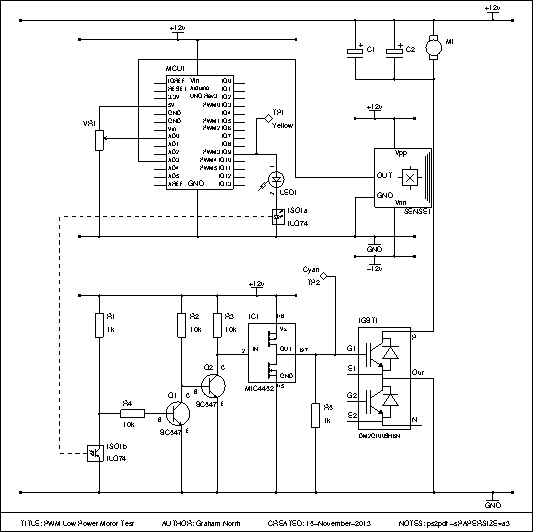
Here an ILQ74 was used which as a transition time of 3uS.
This was reduced using a high gain voltage amplifier.
Q1 and Q2 in the circuit above are BC547 which has a gain of 250, so the full gain is 62,500.
Also the driver chip just doesn't seem up to the mark.
It needed to be loaded with a 1k resistor to have a decent discharge.
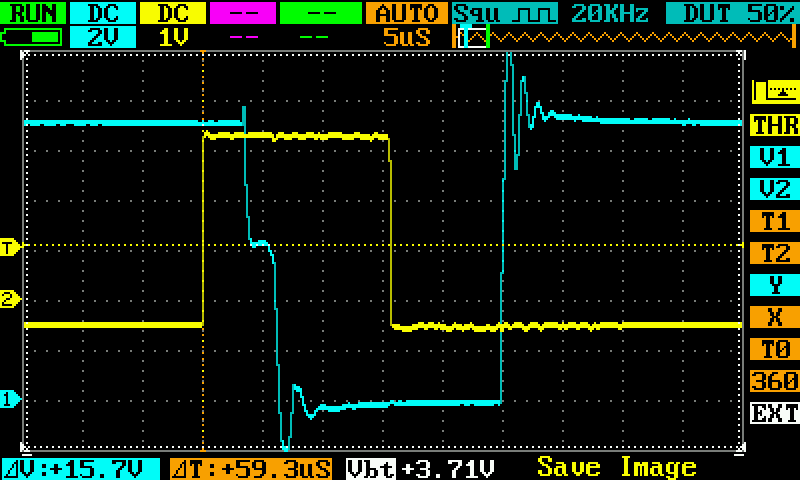
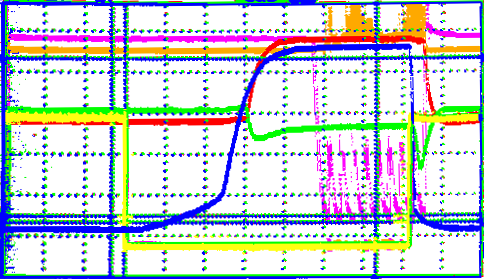
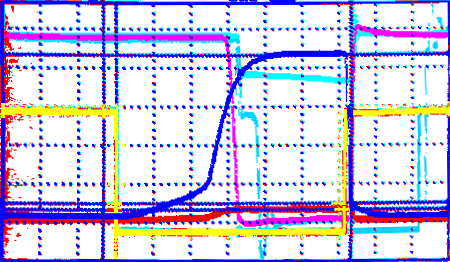
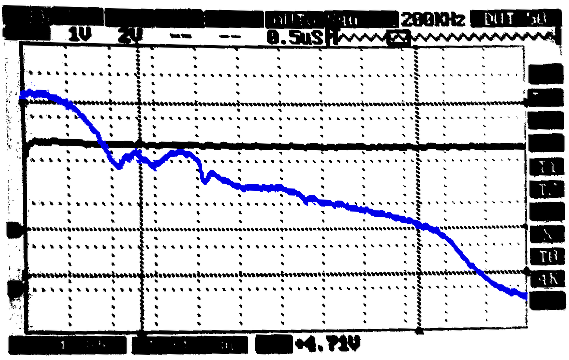
A new scope means the delays and transition times can be clearly shown:
The yellow trace is taken from TP1 and the cyan trace from TP2.
So the delay in switching in the circuit is 5uS for both on and off, but the transition time is about 2uS for off and less than 1uS for on.
Also the output from the Arduino is a very clean square wave with at most 250nS transition and about 100mV(2%) noise.
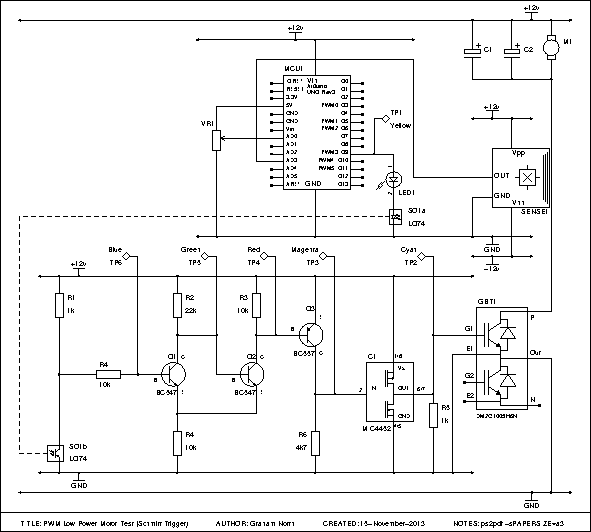
Since the optocoupler output is inverting there is no need for a double inverter voltage amplifier.
The last amplifier is replaced with a current amplifier.
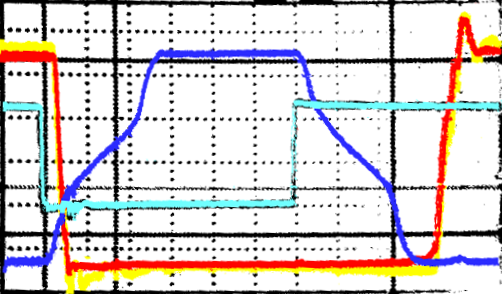
Overlaid shots of the waveforms:
Blue:Source and OptoCouple output
Cyan:First Stage
Green:Second Stage/Driver input
Yellow: Driver output/Gate input
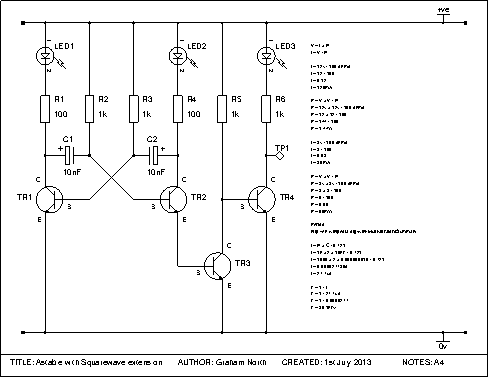
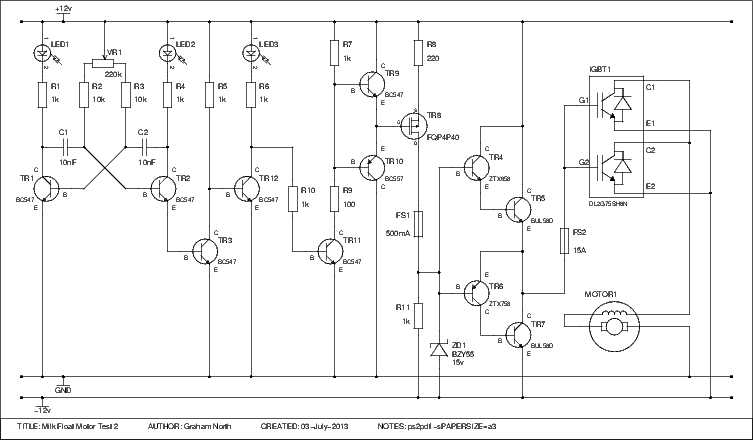
Here the push-pull optocoupler circuit, which was discarded last year, comes in useful to yield faster switching times.
From the last trace shown just above we can see the switch on times of the optocouplers are in fact pretty fast.
The problem is the switch off times.
In order to help this a push-pull pair is added to the output of the CPU and the phototransistor output is arranged also in push-pull.
This improved switch off time (low to high in the trace blue trace) from about 20uS to 5uS.
This ramification is that the on time is now up from <1uS to 5uS also as a symmetrical waveform.
This is better as the fall from +12v and rise from 0v is now quite sharp.
Amplifying this gives us a good square driver input.
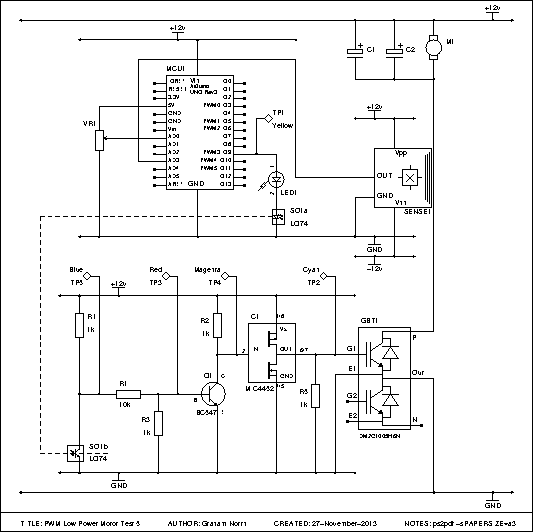
Also the MIC4452 chips are pretty poor at producing a clean gate driver signal.
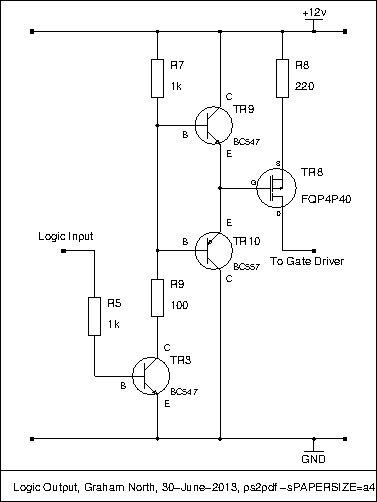
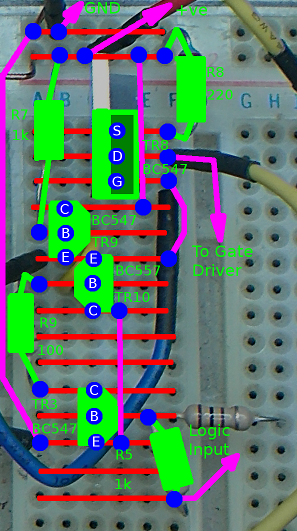
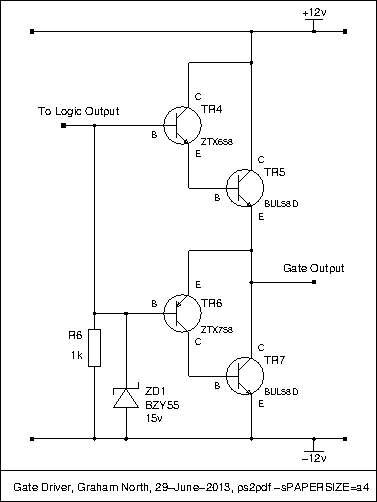
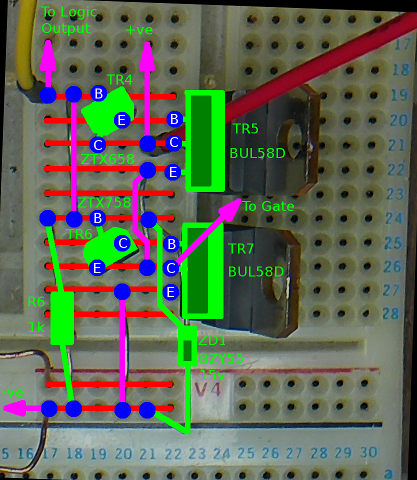
These are replaced by original 2-stage gate driver previously developed.
Since the circuit is being used at 12v the ZTXn58 pair are swapped for the high gain BC5n7 pair also to driver the BUL58D power stages.
The result is a much cleaner squarer gate signal which transitions the gate in 1-2uS
There is still room for improvement as there is some noise on the gate signal, but this is now in the nanoseconds order of magnitude.